|
World of Rigid Bodies (WoRB)
|
|
World of Rigid Bodies (WoRB)
|
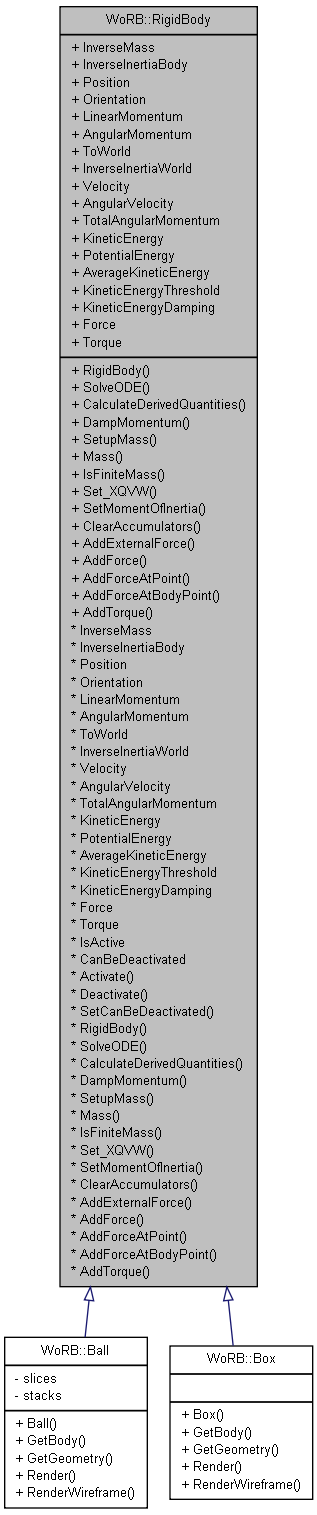
Encapsulates a rigid body. More...
#include <RigidBody.h>

Public Member Functions | |
Constructors and destructors | |
| RigidBody () | |
Integration and simulation methods | |
These methods are used to simulate the rigid body's motion over time. | |
| void | SolveODE (double h) |
| Integrates the rigid body forward in time for the given time-step length. | |
| void | CalculateDerivedQuantities (bool fromMomenta=true) |
| Normalizes orientation and calculates derived quantities from the state variables. | |
| void | DampMomentum (double timeStep) |
| Damp linear and angular momentum. | |
Property getters and setters | |
| void | SetupMass (double mass) |
| Sets the mass of the rigid body. | |
| double | Mass () const |
| Gets the mass of the rigid body. | |
| bool | IsFiniteMass () const |
| Returns true if the mass of the body is not-infinite. | |
| void | Set_XQVW (const Quaternion &X, const Quaternion &Q, const Quaternion &V, const Quaternion &W) |
| Initializs the position, orientation, velocity and angular velocity of the rigid body and updates other derived quantities. | |
| void | SetMomentOfInertia (const QTensor &I_body) |
| Sets the intertia tensor for the rigid body. | |
Setters for the force, torque and acceleration | |
These functions set up forces and torques to apply to the rigid body. | |
| void | ClearAccumulators () |
| Clears the forces and torques in the accumulators. | |
| void | AddExternalForce (const Quaternion &force, double potentialEnergy=0) |
| Adds the given external force to center of mass of the rigid body. | |
| void | AddForce (const Quaternion &force, double potentialEnergy=0) |
| Adds the given internal force to center of mass of the rigid body. | |
| void | AddForceAtPoint (const Quaternion &worldPoint, const Quaternion &force, double potentialEnergy=0) |
| Adds the given internal force to the given point on the rigid body. | |
| void | AddForceAtBodyPoint (const Quaternion &bodyPoint, const Quaternion &force, double potentialEnergy=0) |
| Adds the given internal force to the given point on the rigid body. | |
| void | AddTorque (const Quaternion &torque) |
| Adds the given internal torque to the rigid body. | |
Data Fields | |
Properties and state variables of the rigid body | |
| double | InverseMass |
| Holds the inverse of the mass of the rigid body. | |
| QTensor | InverseInertiaBody |
| Holds the inverse of the body's moment of inertia tensor in body-fixed frame. | |
| Quaternion | Position |
| Holds the linear position of the rigid body in world space. | |
| Quaternion | Orientation |
| Holds the angular orientation of the rigid body in world space. | |
| Quaternion | LinearMomentum |
| Holds the linear momentum of the rigid body in world space. | |
| Quaternion | AngularMomentum |
| Holds the angular momentum of the rigid body in world space. | |
Derived quantities | |
| QTensor | ToWorld |
| Holds a combined translation/rotation matrix for converting from body-fixed local coordinates into world coordinates. | |
| QTensor | InverseInertiaWorld |
| Holds the inverse inertia tensor of the body in world space. | |
| Quaternion | Velocity |
| Holds the linear velocity of the rigid body in world space. | |
| Quaternion | AngularVelocity |
| Holds the angular velocity of the rigid body in world space. | |
| Quaternion | TotalAngularMomentum |
| Holds the total angular momentum of the rigid body in world space. | |
| double | KineticEnergy |
| Holds the total kinetic energy of the rigid body. | |
| double | PotentialEnergy |
| Holds the total potential energy of the rigid body. | |
| double | AverageKineticEnergy |
| Holds the amount of weighted mean kinetic energy of the body. | |
| double | KineticEnergyThreshold |
| Holds the kinetic energy level under which a body will considered stationary. | |
| bool | KineticEnergyDamping |
| Indicates whether to impose kinetic energy damping. | |
Total force and torque accumulators | |
These variables store the current total force, torque and acceleration of the rigid body; these quantities are accummulated inbetween time-steps. | |
| Quaternion | Force |
| Holds the accumulated force to be applied at the next integration step. | |
| Quaternion | Torque |
| Holds the accumulated torque to be applied at the next integration step. | |
Flags controlling ODE solver activity for the body | |
| bool | IsActive |
| A body can be inactivated to avoid it being updated SolveODE or affected by collisions with the scenery. | |
| bool | CanBeDeactivated |
| Controls whether body is allowed to be inactivated. | |
| void | Activate () |
| Allows body to move, i.e. | |
| void | Deactivate () |
| Disallows body to move i.e. | |
| void | SetCanBeDeactivated (bool flag=true) |
| Sets whether the body is ever allowed to be deactivated. | |
Encapsulates a rigid body.
Rigid body is the basic simulation object in the World of Bodies (WoRB).
Properties:
State variables:
Derived quantities:
Definition at line 36 of file RigidBody.h.
| WoRB::RigidBody::RigidBody | ( | ) | [inline] |
Definition at line 132 of file RigidBody.h.
: InverseMass( 0 ) , ToWorld( QTensor::Identity ) , KineticEnergy( 0 ) , PotentialEnergy( 0 ) , AverageKineticEnergy( 0 ) , KineticEnergyThreshold( 0 ) , KineticEnergyDamping( false ) , IsActive( false ) , CanBeDeactivated( false ) { }
| void WoRB::RigidBody::Activate | ( | ) | [inline] |
Allows body to move, i.e.
enables its ODE to be solved.
Definition at line 343 of file RigidBody.h.
References AverageKineticEnergy, IsActive, and Mass().
Referenced by WoRB::Collision::ActivateInactiveBodies(), WoRB::Ball::Ball(), WoRB::Box::Box(), and SetCanBeDeactivated().
{
if ( ! IsActive )
{
IsActive = true;
// Body must have some kinetic energy to avoid immediate deactivation
AverageKineticEnergy = 2 * 0.3 * Mass();
}
}
| void WoRB::RigidBody::AddExternalForce | ( | const Quaternion & | force, |
| double | potentialEnergy = 0 |
||
| ) | [inline] |
Adds the given external force to center of mass of the rigid body.
An external force acts on the whole body equally and does not activate inactive bodies.
Definition at line 399 of file RigidBody.h.
References Force, and PotentialEnergy.
{
Force += force;
PotentialEnergy += potentialEnergy;
}
| void WoRB::RigidBody::AddForce | ( | const Quaternion & | force, |
| double | potentialEnergy = 0 |
||
| ) | [inline] |
Adds the given internal force to center of mass of the rigid body.
Definition at line 407 of file RigidBody.h.
References Force, IsActive, and PotentialEnergy.
{
Force += force;
PotentialEnergy += potentialEnergy;
IsActive = true;
}
| void WoRB::RigidBody::AddForceAtBodyPoint | ( | const Quaternion & | bodyPoint, |
| const Quaternion & | force, | ||
| double | potentialEnergy = 0 |
||
| ) | [inline] |
Adds the given internal force to the given point on the rigid body.
Definition at line 427 of file RigidBody.h.
References AddForceAtPoint(), and ToWorld.
{
AddForceAtPoint( ToWorld( bodyPoint ), force, potentialEnergy );
}
| void WoRB::RigidBody::AddForceAtPoint | ( | const Quaternion & | worldPoint, |
| const Quaternion & | force, | ||
| double | potentialEnergy = 0 |
||
| ) | [inline] |
Adds the given internal force to the given point on the rigid body.
Definition at line 416 of file RigidBody.h.
References Force, IsActive, Position, PotentialEnergy, and Torque.
Referenced by AddForceAtBodyPoint().
{
Force += force;
Torque += ( worldPoint - Position ).Cross( force );
PotentialEnergy += potentialEnergy;
IsActive = true;
}
| void WoRB::RigidBody::AddTorque | ( | const Quaternion & | torque | ) | [inline] |
| void WoRB::RigidBody::CalculateDerivedQuantities | ( | bool | fromMomenta = true | ) | [inline] |
Normalizes orientation and calculates derived quantities from the state variables.
| fromMomenta | If true, derive quantites from linear and angular momenta; otherwise, derive quantities from velocities. |
Definition at line 221 of file RigidBody.h.
References AngularMomentum, AngularVelocity, WoRB::Quaternion::Cross(), WoRB::Quaternion::Dot(), WoRB::QTensor::Inverse(), InverseInertiaBody, InverseInertiaWorld, InverseMass, KineticEnergy, LinearMomentum, Mass(), WoRB::Quaternion::Normalize(), Orientation, Position, WoRB::QTensor::SetFromOrientationAndPosition(), TotalAngularMomentum, ToWorld, and Velocity.
Referenced by WoRB::Collision::PositionProjection(), WoRB_TestBed::ReconfigureTestBed(), Set_XQVW(), WoRB::Sphere::SetMass(), WoRB::Cuboid::SetMass(), and SolveODE().
{
// Normalize the orientation to versor
//
Orientation.Normalize ();
// Setup the transform matrix for the body from orientation and position.
//
ToWorld.SetFromOrientationAndPosition( Orientation, Position );
// Setup the moment of inertia tensor in world frame of reference.
//
InverseInertiaWorld = ToWorld( InverseInertiaBody );
if ( fromMomenta )
{
// Calculate the linear and angular velocity from respecitve momenta
//
Velocity = InverseMass * LinearMomentum;
AngularVelocity = InverseInertiaWorld * AngularMomentum;
}
else
{
// Calculate the linear and angular momentum from repsective velocities
//
LinearMomentum = Mass() * Velocity;
AngularMomentum = InverseInertiaWorld.Inverse () * AngularVelocity;
}
// Calculate the total angular momentum
//
TotalAngularMomentum = Position.Cross( LinearMomentum ) + AngularMomentum;
// Derive the total kinetic energy
//
KineticEnergy = 0.5 * Velocity .Dot( LinearMomentum )
+ 0.5 * AngularVelocity .Dot( AngularMomentum );
}
| void WoRB::RigidBody::ClearAccumulators | ( | ) | [inline] |
Clears the forces and torques in the accumulators.
Definition at line 388 of file RigidBody.h.
References Force, PotentialEnergy, and Torque.
{
Force = 0;
Torque = 0;
PotentialEnergy = 0;
}
| void WoRB::RigidBody::DampMomentum | ( | double | timeStep | ) | [inline] |
Damp linear and angular momentum.
Definition at line 262 of file RigidBody.h.
References AngularMomentum, and LinearMomentum.
Referenced by SolveODE().
{
const double linearDamping = 0;
const double angularDamping = 0.998;
if ( linearDamping > 0 ) {
LinearMomentum *= pow( linearDamping, timeStep );
}
if ( angularDamping > 0 ) {
AngularMomentum *= pow( angularDamping, timeStep );
}
}
| void WoRB::RigidBody::Deactivate | ( | ) | [inline] |
Disallows body to move i.e.
disables its ODE to be solved. For deativated body, its velocities are also set to 0.
Definition at line 356 of file RigidBody.h.
References AngularMomentum, AngularVelocity, Force, IsActive, KineticEnergy, LinearMomentum, Torque, TotalAngularMomentum, and Velocity.
Referenced by WoRB_MexFunction::Parse(), and SolveODE().
{
IsActive = false;
LinearMomentum = 0.0;
AngularMomentum = 0.0;
TotalAngularMomentum = 0.0;
Velocity = 0;
AngularVelocity = 0;
KineticEnergy = 0;
Force = 0.0;
Torque = 0.0;
}
| bool WoRB::RigidBody::IsFiniteMass | ( | ) | const [inline] |
Returns true if the mass of the body is not-infinite.
Definition at line 298 of file RigidBody.h.
References InverseMass.
{
return InverseMass > 0.0;
}
| double WoRB::RigidBody::Mass | ( | ) | const [inline] |
Gets the mass of the rigid body.
Definition at line 290 of file RigidBody.h.
References InverseMass.
Referenced by Activate(), CalculateDerivedQuantities(), and WoRB_TestBed::Dump().
{
return InverseMass == 0 ? 1e+30
: InverseMass >= 1e+30 ? 0.0 : 1.0 / InverseMass;
}
| void WoRB::RigidBody::Set_XQVW | ( | const Quaternion & | X, |
| const Quaternion & | Q, | ||
| const Quaternion & | V, | ||
| const Quaternion & | W | ||
| ) | [inline] |
Initializs the position, orientation, velocity and angular velocity of the rigid body and updates other derived quantities.
| X | The initial position |
| Q | The initial orientation |
| V | The initial velocity |
| W | The initial angular velocity in world space |
Definition at line 307 of file RigidBody.h.
References AngularVelocity, CalculateDerivedQuantities(), Orientation, Position, and Velocity.
Referenced by WoRB::Ball::Ball(), and WoRB::Box::Box().
{
Position = X;
Orientation = Q;
Velocity = V;
AngularVelocity = W;
CalculateDerivedQuantities( /*fromMomenta*/ false );
}
| void WoRB::RigidBody::SetCanBeDeactivated | ( | bool | flag = true | ) | [inline] |
Sets whether the body is ever allowed to be deactivated.
Definition at line 371 of file RigidBody.h.
References Activate(), CanBeDeactivated, and IsActive.
Referenced by WoRB_MexFunction::Parse().
{
CanBeDeactivated = flag;
if ( ! CanBeDeactivated && ! IsActive ) {
Activate ();
}
}
| void WoRB::RigidBody::SetMomentOfInertia | ( | const QTensor & | I_body | ) | [inline] |
Sets the intertia tensor for the rigid body.
Definition at line 324 of file RigidBody.h.
References InverseInertiaBody, and WoRB::QTensor::SetInverseOf().
Referenced by WoRB::Sphere::SetMass(), and WoRB::Cuboid::SetMass().
{
InverseInertiaBody.SetInverseOf( I_body );
}
| void WoRB::RigidBody::SetupMass | ( | double | mass | ) | [inline] |
Sets the mass of the rigid body.
Definition at line 280 of file RigidBody.h.
References InverseMass, and KineticEnergyThreshold.
Referenced by WoRB::Sphere::SetMass(), and WoRB::Cuboid::SetMass().
{
InverseMass = mass == 0 ? 1e+30
: mass >= 1e+30 ? 0.0 : 1.0 / mass;
KineticEnergyThreshold = 0.3 * mass;
}
| void WoRB::RigidBody::SolveODE | ( | double | h | ) | [inline] |
Integrates the rigid body forward in time for the given time-step length.
Definition at line 153 of file RigidBody.h.
References AngularMomentum, AngularVelocity, AverageKineticEnergy, CalculateDerivedQuantities(), CanBeDeactivated, DampMomentum(), Deactivate(), Force, InverseInertiaWorld, InverseMass, IsActive, KineticEnergy, KineticEnergyDamping, KineticEnergyThreshold, LinearMomentum, Orientation, Position, Torque, and Velocity.
{
if ( ! IsActive ) {
return;
}
// Solve the linear momentum
//
LinearMomentum += Force * h;
// Solve the angular momentum in world space (included gyroscopic effect)
//
AngularMomentum += Torque * h;
// If enabled, remove kinetic energy added through the numerical
// instability in the Semi-implicit Euler integrator.
//
if ( KineticEnergyDamping ) {
DampMomentum( h );
}
// Derive the linear and the angular velocity
//
Velocity = InverseMass * LinearMomentum;
AngularVelocity = InverseInertiaWorld * AngularMomentum;
// Calculate the orientation time derivative in world space
//
Quaternion OrientationDot = 0.5 * AngularVelocity * Orientation;
// Solve the linear position
//
Position += Velocity * h;
// Solve the orientation (angular position)
//
Orientation += OrientationDot * h;
// Normalize orientation to versor and calculate derived quantities
//
CalculateDerivedQuantities ();
// Deactivate body, if allowed, when it becomes stationary.
//
if ( CanBeDeactivated )
{
// Calculate exponential average of the kinetic energy
//
double alpha = pow( 0.5, h ); // alpha = 1 / 2^h
AverageKineticEnergy = alpha * AverageKineticEnergy
+ ( 1 - alpha ) * KineticEnergy;
if ( AverageKineticEnergy < KineticEnergyThreshold ) {
Deactivate ();
}
else if ( AverageKineticEnergy > 10 * KineticEnergyThreshold ) {
AverageKineticEnergy = 10 * KineticEnergyThreshold;
}
}
}
Holds the angular momentum of the rigid body in world space.
Definition at line 64 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), DampMomentum(), Deactivate(), WoRB_TestBed::Dump(), WoRB::Collision::ImpulseTransfer(), WoRB_TestBed::RenderDebugInfo(), WoRB::RenderStateVariables(), and SolveODE().
Holds the angular velocity of the rigid body in world space.
Definition at line 87 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), Deactivate(), WoRB_TestBed::Dump(), WoRB::Collision::GetRelativeVelocity(), WoRB_TestBed::RenderDebugInfo(), WoRB::RenderStateVariables(), Set_XQVW(), and SolveODE().
Holds the amount of weighted mean kinetic energy of the body.
Definition at line 103 of file RigidBody.h.
Referenced by Activate(), and SolveODE().
Controls whether body is allowed to be inactivated.
Definition at line 339 of file RigidBody.h.
Referenced by WoRB_TestBed::ReconfigureTestBed(), SetCanBeDeactivated(), and SolveODE().
Holds the accumulated force to be applied at the next integration step.
Definition at line 122 of file RigidBody.h.
Referenced by AddExternalForce(), AddForce(), AddForceAtPoint(), ClearAccumulators(), Deactivate(), WoRB::Collision::GetBouncingVelocity(), WoRB::Collision::GetRelativeVelocity(), and SolveODE().
Holds the inverse of the body's moment of inertia tensor in body-fixed frame.
Definition at line 48 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), and SetMomentOfInertia().
Holds the inverse inertia tensor of the body in world space.
Definition at line 79 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), WoRB::Collision::GetImpulse(), WoRB::Collision::GetImpulse_IncludeFriction(), WoRB::Collision::ImpulseTransfer(), WoRB::Collision::PositionProjection(), and SolveODE().
| double WoRB::RigidBody::InverseMass |
Holds the inverse of the mass of the rigid body.
Definition at line 44 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), WoRB::Collision::GetBouncingVelocity(), WoRB::Collision::GetImpulse(), WoRB::Collision::GetImpulse_IncludeFriction(), WoRB::Collision::GetRelativeVelocity(), WoRB::Collision::ImpulseTransfer(), IsFiniteMass(), Mass(), WoRB::Collision::PositionProjection(), SetupMass(), and SolveODE().
A body can be inactivated to avoid it being updated SolveODE or affected by collisions with the scenery.
Definition at line 335 of file RigidBody.h.
Referenced by Activate(), WoRB::Collision::ActivateInactiveBodies(), AddForce(), AddForceAtPoint(), AddTorque(), Deactivate(), WoRB::Collision::GetBouncingVelocity(), WoRB::Ball::Render(), WoRB::Box::Render(), SetCanBeDeactivated(), and SolveODE().
Holds the total kinetic energy of the rigid body.
Definition at line 95 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), Deactivate(), WoRB_TestBed::Dump(), and SolveODE().
Indicates whether to impose kinetic energy damping.
Definition at line 111 of file RigidBody.h.
Referenced by SolveODE().
Holds the kinetic energy level under which a body will considered stationary.
Definition at line 107 of file RigidBody.h.
Referenced by SetupMass(), and SolveODE().
Holds the linear momentum of the rigid body in world space.
Definition at line 60 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), DampMomentum(), Deactivate(), WoRB_TestBed::Dump(), WoRB::Collision::ImpulseTransfer(), WoRB_TestBed::RenderDebugInfo(), and SolveODE().
Holds the angular orientation of the rigid body in world space.
Definition at line 56 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), WoRB_TestBed::Dump(), WoRB::Collision::PositionProjection(), WoRB_TestBed::ReconfigureTestBed(), WoRB_TestBed::RenderDebugInfo(), Set_XQVW(), and SolveODE().
Holds the linear position of the rigid body in world space.
Definition at line 52 of file RigidBody.h.
Referenced by AddForceAtPoint(), CalculateDerivedQuantities(), WoRB_TestBed::Dump(), WoRB::Collision::PositionProjection(), WoRB_TestBed::ReconfigureTestBed(), WoRB_TestBed::RenderDebugInfo(), WoRB::RenderStateVariables(), Set_XQVW(), SolveODE(), and WoRB::Collision::UpdateDerivedQuantities().
Holds the total potential energy of the rigid body.
Definition at line 99 of file RigidBody.h.
Referenced by AddExternalForce(), AddForce(), AddForceAtPoint(), and ClearAccumulators().
Holds the accumulated torque to be applied at the next integration step.
Definition at line 126 of file RigidBody.h.
Referenced by AddForceAtPoint(), AddTorque(), ClearAccumulators(), Deactivate(), and SolveODE().
Holds the total angular momentum of the rigid body in world space.
Definition at line 91 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), and Deactivate().
Holds a combined translation/rotation matrix for converting from body-fixed local coordinates into world coordinates.
Columns of ToWorld transofmr matrix are base unit vectors (axes) of the rigid body as seen in the world frame of reference.
Definition at line 75 of file RigidBody.h.
Referenced by AddForceAtBodyPoint(), WoRB::Geometry::Axis(), CalculateDerivedQuantities(), WoRB::Cuboid::Check(), WoRB::GLTransform::GLTransform(), WoRB::Geometry::Position(), WoRB::Cuboid::RegisterContactOnAxis(), WoRB::Cuboid::RegisterContactOnAxis_Thorough(), and WoRB_TestBed::Simulate().
Holds the linear velocity of the rigid body in world space.
Definition at line 83 of file RigidBody.h.
Referenced by CalculateDerivedQuantities(), Deactivate(), WoRB_TestBed::Dump(), WoRB::Collision::GetRelativeVelocity(), WoRB_TestBed::ReconfigureTestBed(), WoRB_TestBed::RenderDebugInfo(), Set_XQVW(), and SolveODE().
 1.8.0
1.8.0 
