|
World of Rigid Bodies (WoRB)
|
|
World of Rigid Bodies (WoRB)
|
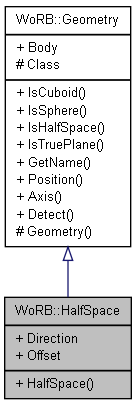
Represents a half-space defined by a plane where the normal of the plane points out of the half-space. More...
#include <Geometry.h>

Public Member Functions | |
| HalfSpace () | |
Data Fields | |
| Quaternion | Direction |
| The plane normal. | |
| double | Offset |
| The distance of the plane from the origin. | |
Represents a half-space defined by a plane where the normal of the plane points out of the half-space.
Definition at line 107 of file Geometry.h.
| WoRB::HalfSpace::HalfSpace | ( | ) | [inline] |
Definition at line 111 of file Geometry.h.
: Geometry( Geometry::_HalfSpace ) , Offset( 0 ) { }
The plane normal.
Definition at line 119 of file Geometry.h.
Referenced by WoRB::Sphere::Check(), WoRB::Cuboid::Check(), WoRB::Sphere::Intersects(), and WoRB::Cuboid::Intersects().
| double WoRB::HalfSpace::Offset |
The distance of the plane from the origin.
Definition at line 123 of file Geometry.h.
Referenced by WoRB::Sphere::Check(), WoRB::Cuboid::Check(), WoRB::Sphere::Intersects(), and WoRB::Cuboid::Intersects().
 1.8.0
1.8.0 
