|
World of Rigid Bodies (WoRB)
|
|
World of Rigid Bodies (WoRB)
|
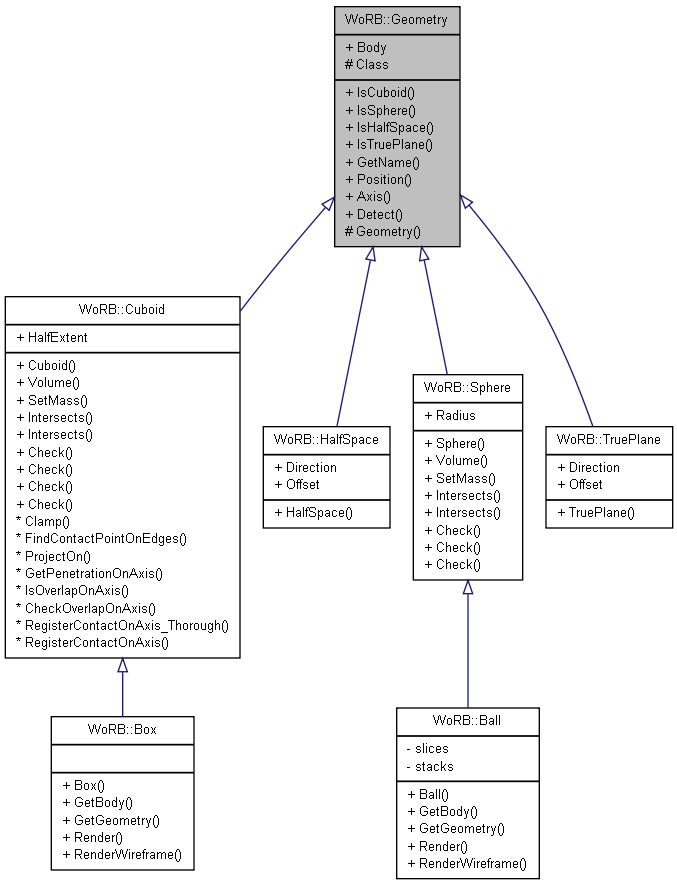
Represents a geometry used to detect collisions against. More...
#include <Geometry.h>

Public Member Functions | |
| bool | IsCuboid () const |
| bool | IsSphere () const |
| bool | IsHalfSpace () const |
| bool | IsTruePlane () const |
| const char * | GetName () const |
| Returns class of the geometry as a string. | |
| Quaternion | Position () const |
| Gets the position vector of the geometry. | |
| Quaternion | Axis (unsigned index) const |
| Gets the unit base vector (axes) of the geometry, given by the index. | |
| void | Detect (CollisionResolver &owner, const Geometry *B) const |
| Detects and registers a collision between this and the other geometry. | |
Data Fields | |
| RigidBody * | Body |
| The rigid body that is represented by this geometry. | |
Protected Types | |
| enum | GeometryClass { _Sphere, _Cuboid, _HalfSpace, _TruePlane } |
Protected Member Functions | |
| Geometry (GeometryClass type, RigidBody *body=0) | |
| Protected constructor; disallows explicit instantiation of the class. | |
Protected Attributes | |
| GeometryClass | Class |
| Holds the geometry class of the object. | |
Represents a geometry used to detect collisions against.
Cannot be explicitly instantiated.
Definition at line 27 of file Geometry.h.
enum WoRB::Geometry::GeometryClass [protected] |
Definition at line 31 of file Geometry.h.
{
_Sphere,
_Cuboid,
_HalfSpace,
_TruePlane
};
| WoRB::Geometry::Geometry | ( | GeometryClass | type, |
| RigidBody * | body = 0 |
||
| ) | [inline, protected] |
Protected constructor; disallows explicit instantiation of the class.
Definition at line 45 of file Geometry.h.
| Quaternion WoRB::Geometry::Axis | ( | unsigned | index | ) | const [inline] |
Gets the unit base vector (axes) of the geometry, given by the index.
Definition at line 88 of file Geometry.h.
References Body, WoRB::QTensor::Column(), and WoRB::RigidBody::ToWorld.
Referenced by WoRB::Cuboid::Check(), WoRB::Cuboid::Intersects(), WoRB::Cuboid::ProjectOn(), and WoRB::Cuboid::RegisterContactOnAxis().
| void Geometry::Detect | ( | CollisionResolver & | owner, |
| const Geometry * | B | ||
| ) | const |
Detects and registers a collision between this and the other geometry.
Definition at line 18 of file CollisionDetection.cpp.
References _Cuboid, _HalfSpace, _Sphere, _TruePlane, Class, and WoRB::CollisionResolver::HasSpaceForMoreContacts().
Referenced by WoRB::WorldOfRigidBodies< 256, 1024 >::SolveODE().
{
if ( ! owner.HasSpaceForMoreContacts () ) {
return;
}
typedef const Cuboid* Cuboid_ ;
typedef const Sphere* Sphere_ ;
typedef const HalfSpace* HalfSpace_ ;
typedef const TruePlane* TruePlane_ ;
switch( Class )
{
case _Sphere: switch( B->Class )
{
case _Sphere: Sphere_(this)->Check( owner, *Sphere_(B) ); break;
case _Cuboid: Cuboid_(B) ->Check( owner, *Sphere_(this) ); break;
case _HalfSpace: Sphere_(this)->Check( owner, *HalfSpace_(B) ); break;
case _TruePlane: Sphere_(this)->Check( owner, *TruePlane_(B) ); break;
}
break;
case _Cuboid: switch( B->Class )
{
case _Sphere: Cuboid_(this)->Check( owner, *Sphere_(B) ); break;
case _Cuboid: Cuboid_(this)->Check( owner, *Cuboid_(B) ); break;
case _HalfSpace: Cuboid_(this)->Check( owner, *HalfSpace_(B) ); break;
case _TruePlane: /* not implemented */ ; break;
}
break;
case _HalfSpace: switch( B->Class )
{
case _Sphere: Sphere_(B)->Check( owner, *HalfSpace_(this) ); break;
case _Cuboid: Cuboid_(B)->Check( owner, *HalfSpace_(this) ); break;
case _HalfSpace: /* not implemented */ ; break;
case _TruePlane: /* not implemented */ ; break;
}
break;
case _TruePlane: switch( B->Class )
{
case _Sphere: Sphere_(B)->Check( owner, *TruePlane_(this) ); break;
case _Cuboid: /* not implemented */ ; break;
case _HalfSpace: /* not implemented */ ; break;
case _TruePlane: /* not implemented */ ; break;
}
break;
}
}
| const char* WoRB::Geometry::GetName | ( | ) | const [inline] |
Returns class of the geometry as a string.
Definition at line 60 of file Geometry.h.
References _Cuboid, _HalfSpace, _Sphere, _TruePlane, and Class.
Referenced by WoRB_TestBed::Dump().
{
switch( Class )
{
case _Sphere: return "Sphere";
case _Cuboid: return "Cuboid";
case _HalfSpace: return "HalfSpace";
case _TruePlane: return "TruePlane";
}
return "(unknown)";
}
| bool WoRB::Geometry::IsCuboid | ( | ) | const [inline] |
Definition at line 53 of file Geometry.h.
References _Cuboid, and Class.
Referenced by WoRB_TestBed::Dump().
| bool WoRB::Geometry::IsHalfSpace | ( | ) | const [inline] |
Definition at line 55 of file Geometry.h.
References _HalfSpace, and Class.
{ return Class == _HalfSpace; }
| bool WoRB::Geometry::IsSphere | ( | ) | const [inline] |
Definition at line 54 of file Geometry.h.
References _Sphere, and Class.
Referenced by WoRB_TestBed::Dump().
| bool WoRB::Geometry::IsTruePlane | ( | ) | const [inline] |
Definition at line 56 of file Geometry.h.
References _TruePlane, and Class.
{ return Class == _TruePlane; }
| Quaternion WoRB::Geometry::Position | ( | ) | const [inline] |
Gets the position vector of the geometry.
Definition at line 79 of file Geometry.h.
References Body, WoRB::QTensor::Column(), and WoRB::RigidBody::ToWorld.
Referenced by WoRB::Sphere::Check(), WoRB::Cuboid::Check(), WoRB::Sphere::Intersects(), and WoRB::Cuboid::Intersects().
The rigid body that is represented by this geometry.
Null in case of a scenery object (like a half-plane).
Definition at line 75 of file Geometry.h.
Referenced by Axis(), WoRB::Ball::Ball(), WoRB::Box::Box(), WoRB::Sphere::Check(), WoRB::Cuboid::Check(), WoRB::WorldOfRigidBodies< MaxObjects, MaxCollisions >::RigidBodies::Exists(), WoRB::WorldOfRigidBodies< MaxObjects, MaxCollisions >::RigidBodies::Next(), WoRB::WorldOfRigidBodies< MaxObjects, MaxCollisions >::RigidBodies::operator->(), Position(), WoRB_TestBed::ReconfigureTestBed(), WoRB::Cuboid::RegisterContactOnAxis(), WoRB::Cuboid::RegisterContactOnAxis_Thorough(), WoRB::Ball::Render(), WoRB::Box::Render(), WoRB::WorldOfRigidBodies< MaxObjects, MaxCollisions >::RigidBodies::RigidBodies(), WoRB::Sphere::SetMass(), and WoRB::Cuboid::SetMass().
GeometryClass WoRB::Geometry::Class [protected] |
Holds the geometry class of the object.
Definition at line 41 of file Geometry.h.
Referenced by Detect(), GetName(), IsCuboid(), IsHalfSpace(), IsSphere(), and IsTruePlane().
 1.8.0
1.8.0 
